Flow and Diffusion models Lab 2-1 - Gaussian Probability Path w Flow matching
1 Gaussian Conditional Probability Path
Gaussian conditional probability path is given by
\(p_t(x|z) = N(x;\alpha_t z,\beta_t^2 I_d),\quad\quad\quad p_{\text{simple}}=N(0,I_d),\)
where $\alpha_t: [0,1] \to \mathbb{R}$ and $\beta_t: [0,1] \to \mathbb{R}$ are monotonic, continuously differentiable functions satisfying $\alpha_1 = \beta_0 = 1$ and $\alpha_0 = \beta_1 = 0$.
In other words, this implies that $p_1(x|z) = \delta_z$ and $p_0(x|z) = N(0, I_d)$ is a unit Gaussian.
and we can use $\alpha_t = t$ and $\beta_t = \sqrt{1-t}$
class LinearAlpha(Alpha):
"""
Implements alpha_t = t
"""
def __call__(self, t: torch.Tensor) -> torch.Tensor:
return t
def dt(self, t: torch.Tensor) -> torch.Tensor:
return torch.ones_like(t)
class SquareRootBeta(Beta):
"""
Implements beta_t = squareroot(1-t)
"""
def __call__(self, t: torch.Tensor) -> torch.Tensor:
return torch.sqrt(1-t)
def dt(self, t: torch.Tensor) -> torch.Tensor:
return - 0.5 / (torch.sqrt(1 - t) + 1e-4)
Now we can have the groundtruth of the GCPP
class GaussianConditionalProbabilityPath(ConditionalProbabilityPath):
def __init__(self, p_data: Sampleable, alpha: Alpha, beta: Beta):
p_simple = Gaussian.isotropic(p_data.dim, 1.0)
super().__init__(p_simple, p_data)
self.alpha = alpha
self.beta = beta
def sample_conditioning_variable(self, num_samples: int) -> torch.Tensor:
"""
Samples the conditioning variable z ~ p_data(x)
Args:
- num_samples: the number of samples
Returns:
- z: samples from p(z), (num_samples, dim)
"""
return self.p_data.sample(num_samples)
def sample_conditional_path(self, z: torch.Tensor, t: torch.Tensor) -> torch.Tensor:
"""
Samples from the conditional distribution p_t(x|z) = N(alpha_t * z, beta_t**2 * I_d)
Args:
- z: conditioning variable (num_samples, dim)
- t: time (num_samples, 1)
Returns:
- x: samples from p_t(x|z), (num_samples, dim)
"""
return self.alpha(t) * z + self.beta(t) * torch.randn_like(z)
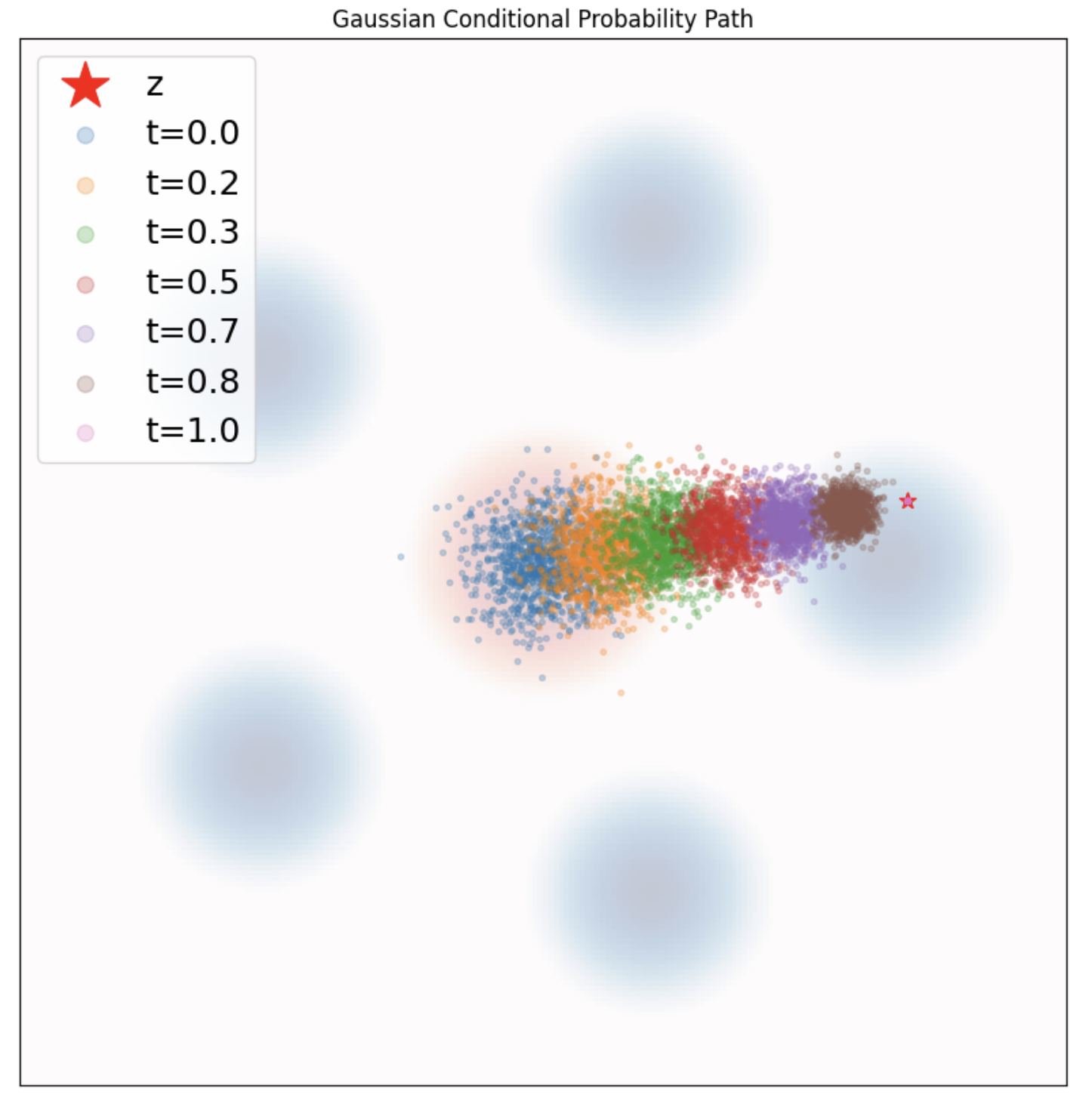
To show the probality path, plot samples
for t in ts:
zz = z.expand(num_samples, 2)
tt = t.unsqueeze(0).expand(num_samples, 1) # (samples, 1)
samples = path.sample_conditional_path(zz, tt) # (samples, 2)
2 Flowing Matching using Conditional Vector Field
Analytically, we know that the conditional vector field $u_t(x|z)$ is given by \(u_t(x|z) = \left(\dot{\alpha}_t-\frac{\dot{\beta}_t}{\beta_t}\alpha_t\right)z+\frac{\dot{\beta}_t}{\beta_t}x.\)
class GaussianConditionalProbabilityPath(ConditionalProbabilityPath):
...
def conditional_vector_field(self, x: torch.Tensor, z: torch.Tensor, t: torch.Tensor) -> torch.Tensor:
"""
Evaluates the conditional vector field u_t(x|z)
Note: Only defined on t in [0,1)
Args:
- x: position variable (num_samples, dim)
- z: conditioning variable (num_samples, dim)
- t: time (num_samples, 1)
Returns:
- conditional_vector_field: conditional vector field (num_samples, dim)
"""
alpha_t = self.alpha(t) # (num_samples, 1)
beta_t = self.beta(t) # (num_samples, 1)
dt_alpha_t = self.alpha.dt(t) # (num_samples, 1)
dt_beta_t = self.beta.dt(t) # (num_samples, 1)
return (dt_alpha_t - dt_beta_t / beta_t * alpha_t) * z + dt_beta_t / beta_t * x
Define the ODE $d X_t = u_t(X_t|z)dt, \quad X_0 = x_0 \sim p_{\text{simple}}.$. Drift coefficient is just the vector field.
class ConditionalVectorFieldODE(ODE):
def __init__(self, path: ConditionalProbabilityPath, z: torch.Tensor):
super().__init__()
self.path = path
self.z = z
def drift_coefficient(self, x: torch.Tensor, t: torch.Tensor) -> torch.Tensor:
bs = x.shape[0]
z = self.z.expand(bs, *self.z.shape[1:])
return self.path.conditional_vector_field(x,z,t)
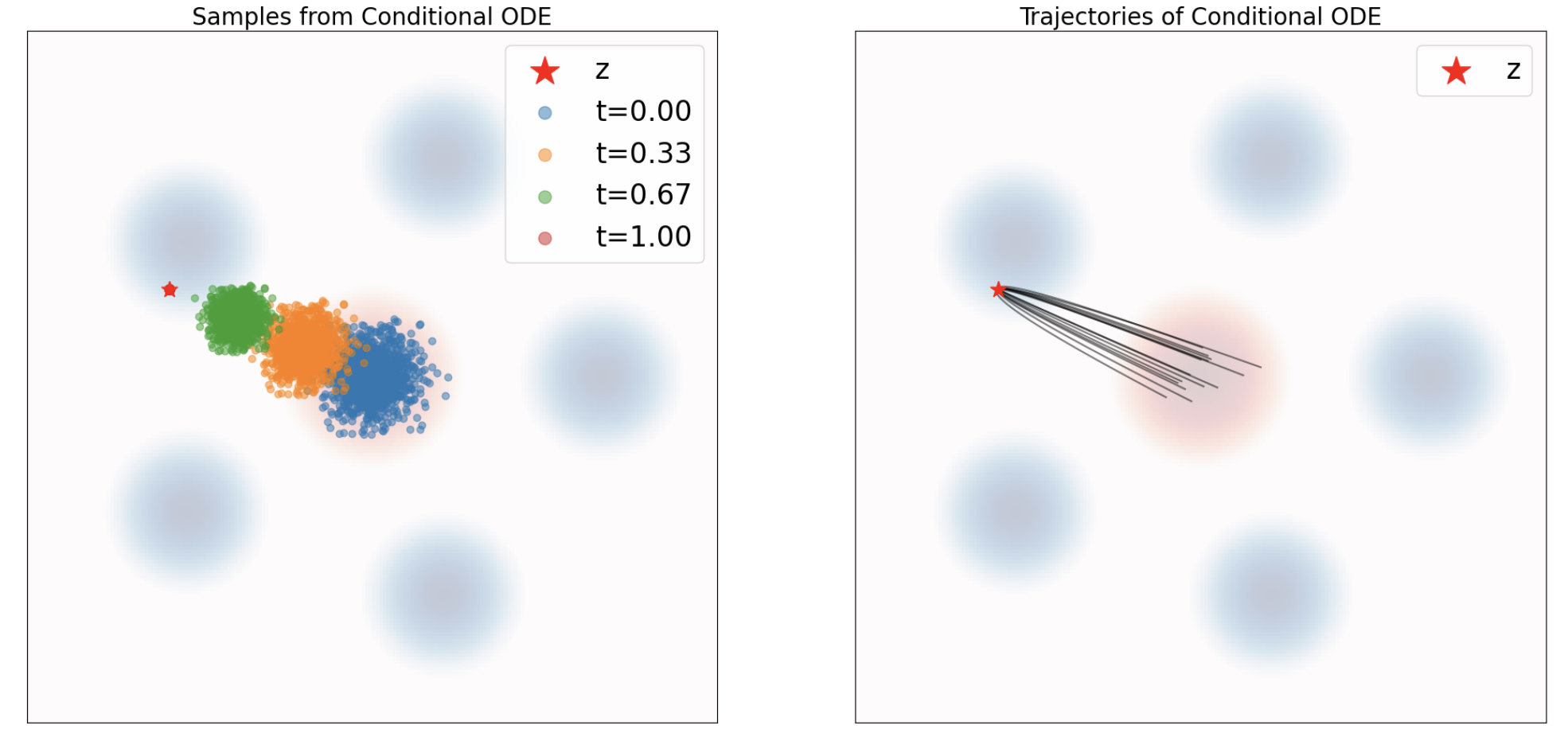
Extract every n-th step from xts get the 1st figure and show all xts get the 2nd figure
ode = ConditionalVectorFieldODE(path, z)
simulator = EulerSimulator(ode)
x0 = path.p_simple.sample(num_samples) # (num_samples, 2)
ts = torch.linspace(0.0, 1.0, num_timesteps).view(1,-1,1).expand(num_samples,-1,1).to(device) # (num_samples, nts, 1)
xts = simulator.simulate_with_trajectory(x0, ts) # (bs, nts, dim)
3 Training for Flow matching
Due to the marginal vector field can be get from weighted conditional vector field, the loss function based on marginal vector field equals to a constant, plus loss function of conditional vector field. So we can train based on conditional vector field \(\mathcal{L}_{CFM}(\theta) = \,\mathbb{E}_{t \in \mathcal{U}[0,1), z \sim p(z), x \sim p_t(x|z)} {\lVert u_t^{\theta}(x) - u_t^{\text{ref}}(x|z)\rVert^2}\) using a Monte-Carlo estimate of the form \(\frac{1}{N}\sum_{i=1}^N {\lVert u_{t_i}^{\theta}(x_i) - u_{t_i}^{\text{ref}}(x_i|z_i)\rVert^2}, \quad \quad \quad \forall i\in[1, \dots, N]: {\,z_i \sim p_{\text{data}},\, t_i \sim \mathcal{U}[0,1),\, x_i \sim p_t(\cdot | z_i)}.\) Here is how we sample
zis sampled fromp_datatis sampled fromtorch.randxis sampled frompath.sample_conditional_path(z, t), same as groundtruthu_refis get frompath.conditional_vector_field(x,z,t), same as drift coeff used with insimulate_with_trajectoryclass ConditionalFlowMatchingTrainer(Trainer): def __init__(self, path: ConditionalProbabilityPath, model: MLPVectorField, **kwargs): super().__init__(model, **kwargs) self.path = path def get_train_loss(self, batch_size: int) -> torch.Tensor: z = self.path.p_data.sample(batch_size) # (bs, dim) t = torch.rand(batch_size,1).to(z) # (bs, 1) x = self.path.sample_conditional_path(z,t) # (bs, dim) ut_theta = self.model(x,t) # (bs, dim) ut_ref = self.path.conditional_vector_field(x,z,t) # (bs, dim) error = torch.sum(torch.square(ut_theta - ut_ref), dim=-1) # (bs,) return torch.mean(error)Train the model with MLP, pretty standard, and now you have an ODE, which directly use the trained vector field as drift coeff. ( Before we use vector field from the probability path )
class LearnedVectorFieldODE(ODE): def __init__(self, net: MLPVectorField): self.net = net def drift_coefficient(self, x: torch.Tensor, t: torch.Tensor) -> torch.Tensor: return self.net(x, t)Now we can plot out the simulated path
xts. Be aware that this marginal probability path, so data are spread into all possible distributions, NOT only converged into one single samplezas in conditional probability path.ode = LearnedVectorFieldODE(flow_model) # compare to ode = onditionalVectorFieldODE(path, z) simulator = EulerSimulator(ode) x0 = path.p_simple.sample(num_samples) # (num_samples, 2) ts = torch.linspace(0.0, 1.0, num_timesteps).view(1,-1,1).expand(num_samples,-1,1).to(device) # (num_samples, nts, 1) xts = simulator.simulate_with_trajectory(x0, ts) # (bs, nts, dim)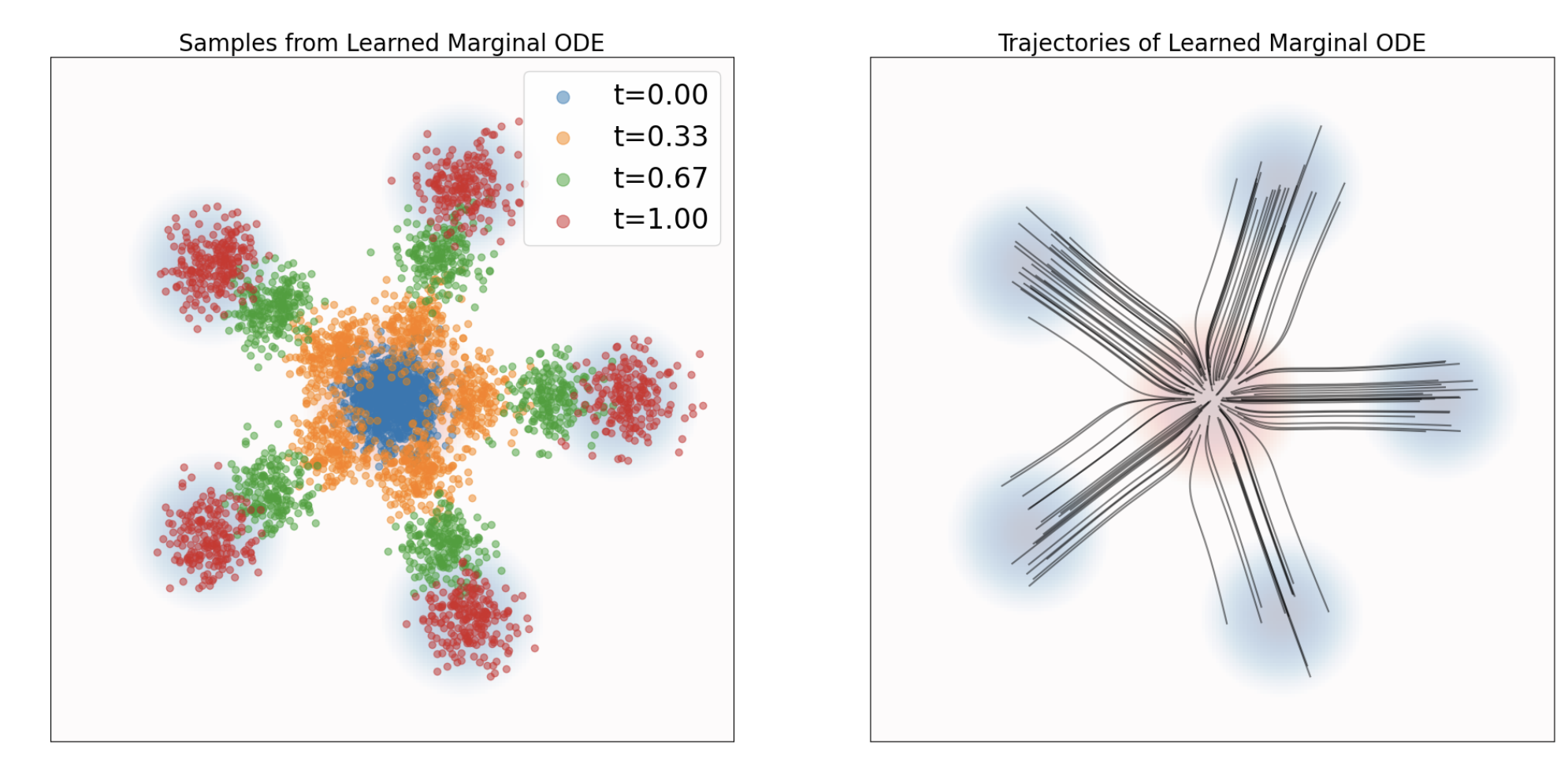
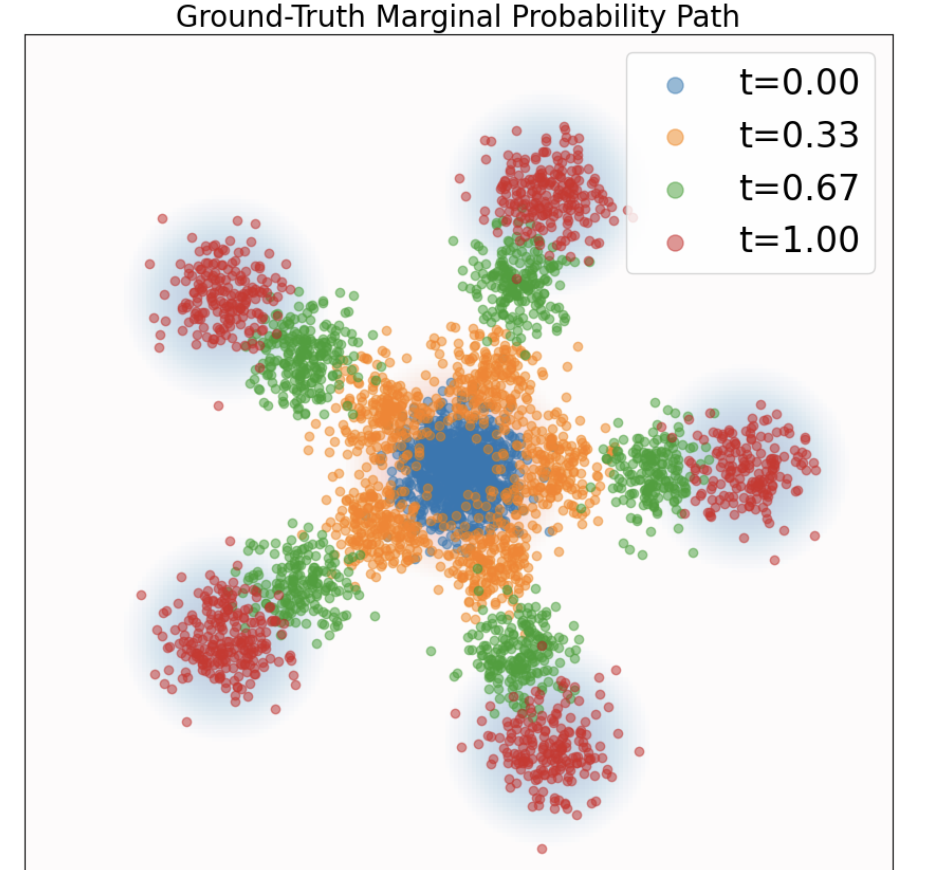
We can also plot out the groundtruth, which is directly get from sample_marginal_path. The implementation is actually still use sample_conditional_path but with num_samples output
class ConditionalProbabilityPath(torch.nn.Module, ABC):
...
def sample_marginal_path(self, t: torch.Tensor) -> torch.Tensor:
"""
Samples from the marginal distribution p_t(x) = p_t(x|z) p(z)
Args:
- t: time (num_samples, 1)
Returns:
- x: samples from p_t(x), (num_samples, dim)
"""
num_samples = t.shape[0]
# Sample conditioning variable z ~ p(z)
z = self.sample_conditioning_variable(num_samples) # (num_samples, dim)
# Sample conditional probability path x ~ p_t(x|z)
x = self.sample_conditional_path(z, t) # (num_samples, dim)
return x